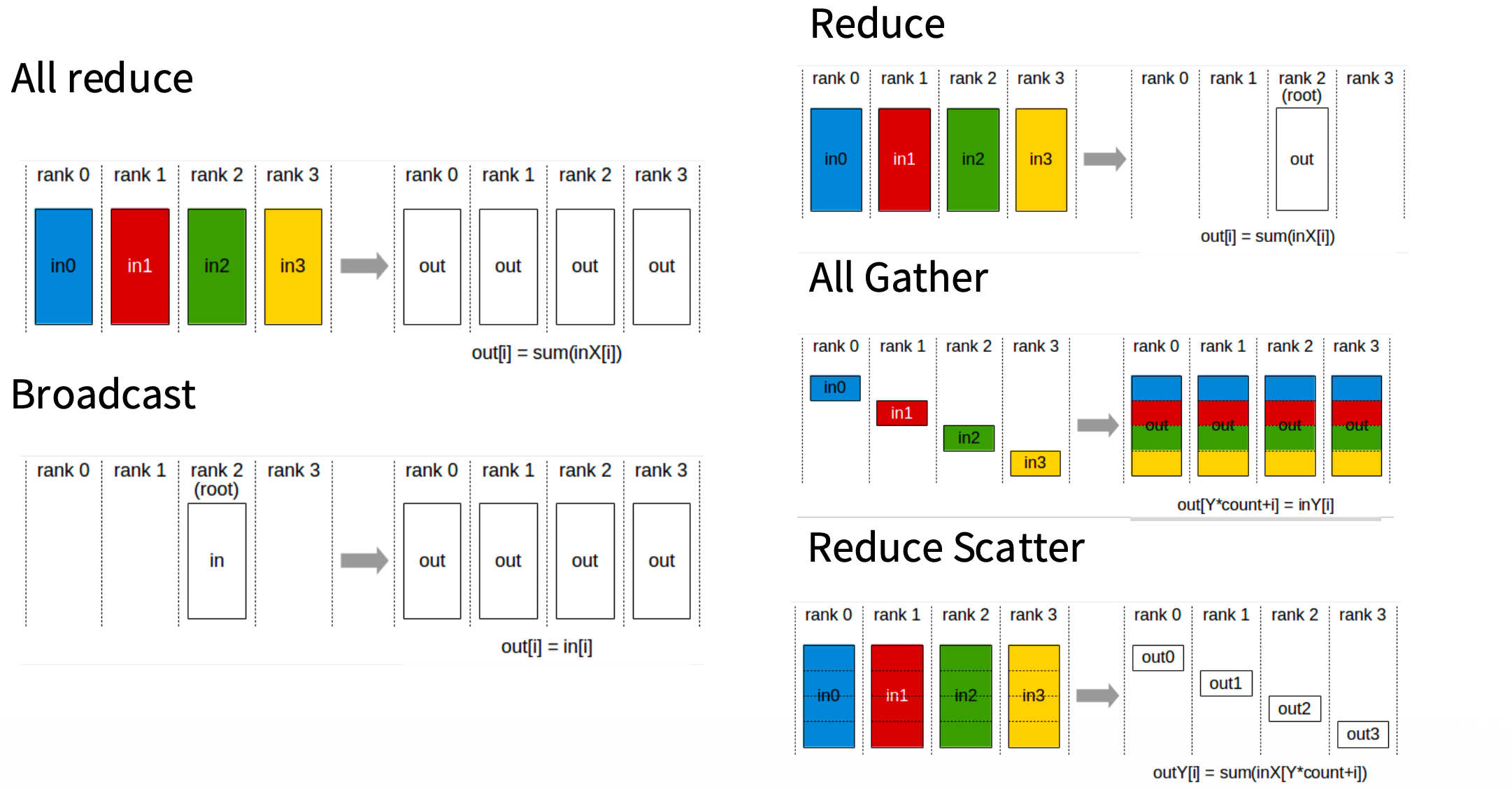
分布式通信原语
- All reduce:根进程 $P_r$ 拥有一个大小为 $K$ 的消息缓冲区 $B$。操作结束后,通信组内的所有进程 $P_i$ 都拥有了 $B$ 的完全一致的副本。
- Scatter:根进程 $P_r$ 拥有一个大向量 $V$,将其均匀切分为 $N$ 个块,记为 $v_0, v_1, \dots, v_{N-1}$。操作结束后,$P_i$ 仅获得对应的分块 $v_i$。
- Gather:Scatter 的逆操作。每个进程 $P_i$ 拥有一个数据块 $v_i$。操作结束后,根进程 $P_r$ 将这些块按 Rank 顺序拼接,在其内存中形成完整向量 $V = [v_0, v_1, \dots, v_{N-1}]$。
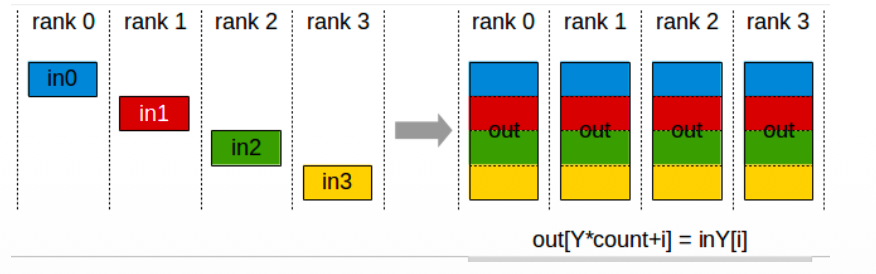
- All-Gather:每个进程 $P_i$ 拥有数据块 $v_i$。操作相当于先执行 Gather,再执行 Broadcast。操作结束后,每一个进程 $P_i$ 都拥有完整的向量 $V = [v_0, v_1, \dots, v_{N-1}]$。
- Reduce:每个进程 $P_i$ 拥有一个向量 $X_i$。操作结束后,根进程 $P_r$ 获得结果 $R = X_0 \oplus X_1 \oplus \dots \oplus X_{N-1}$。
- All-Reduce:逻辑上等价于 Reduce + Broadcast。操作结束后,所有进程 $P_i$ 都获得了完全相同的规约结果 $R = \sum_{j=0}^{N-1} X_j$。
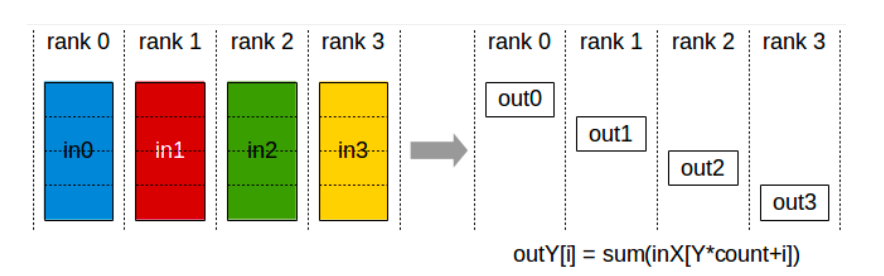
- Reduce-Scatter:逻辑上等价于先对全局数据做 Reduce 得到结果 $R$,然后将 $R$ Scatter 给各个进程。操作结束后,$P_i$ 获得结果向量的第 $i$ 个分块。
LLM 训练中不同的并行策略
朴素数据并行 DP
数据并行中每个 GPU 都有一个完整的模型副本,输入 Batch 会被切分为多个 Mini Batch 并喂给不同的 GPU,每个 GPU 正常计算出梯度后,通过 All-Reduce 计算出全局梯度,再对参数进行更新。
- 计算扩展性:每个 GPU 计算 B/M 个样本。
- 通信开销:
2x#params,来自 All-Reduce 的过程。 - 内存拓展性:无。每个 GPU 必须完整存储模型。
ZeRO
如下图所示,一个参数量为 $\Phi$ 的模型,进行 AMP 训练时,显存占用大致为:
- 参数占 2$\Phi$ (2 指的是字节,BF16 为两字节)
- 梯度占 2$\Phi$
- 优化器状态 12$\Phi$ (FP32 参数、FP32 动量、FP32 方差)
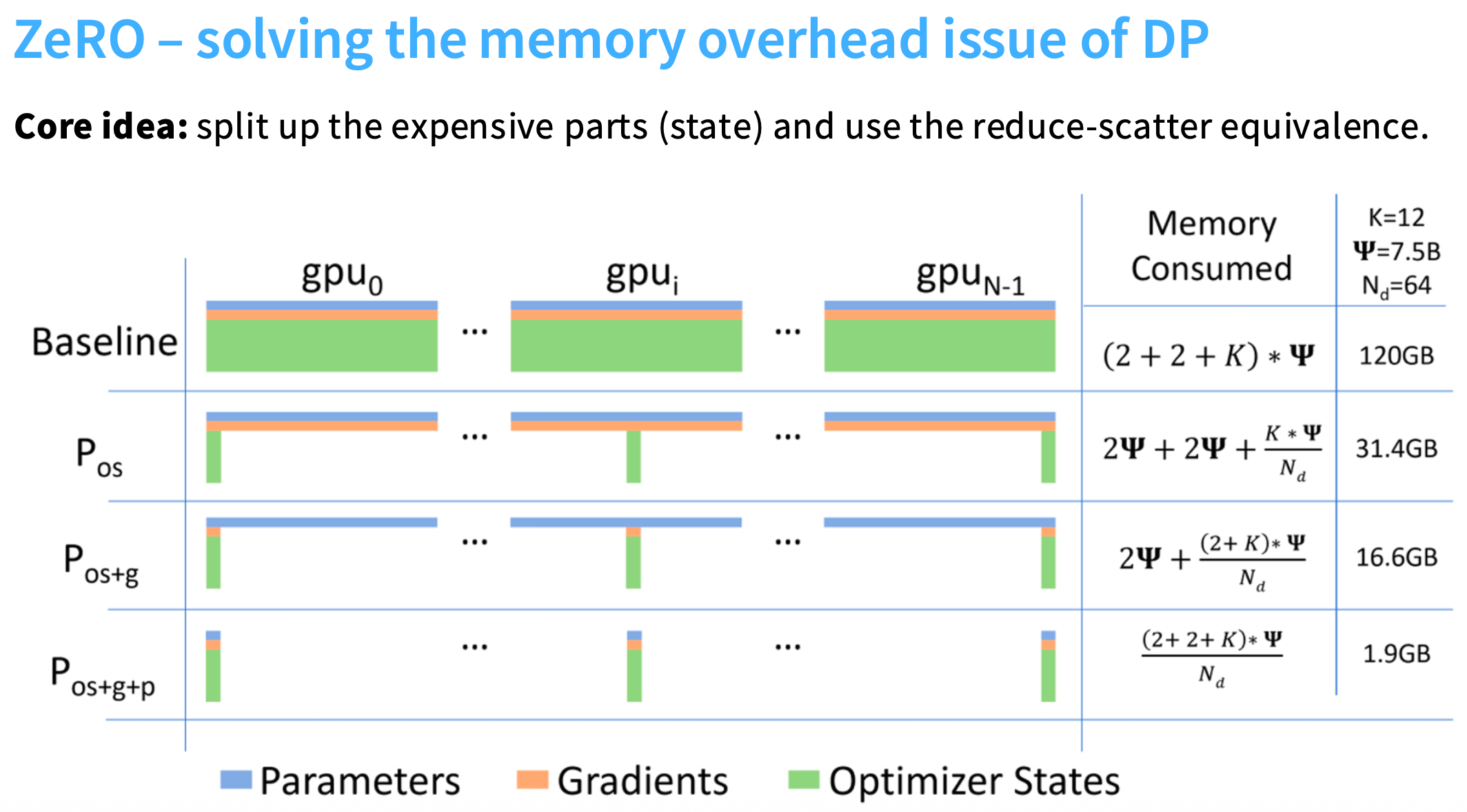
在朴素 DP 中, 每个 GPU 都要完全存储上面三个状态。微软 DeepSpeed 团队提出的 ZeRO 技术,逐步消除了上述三个部分的数据冗余。
- Stage 1:切分优化器状态
在 Stage 1 中,优化器状态被切分到不同的 GPU 上,每个 GPU 负责对一部分参数进行更新,然后通过 All Gather 让每个 GPU 都有一完整的更新后的参数。
具体来说,其算法步骤为:
-
每个 GPU 计算 Mini Batch 上的梯度;
-
Reduce Scatter 梯度,这里产生了
#params的通信开销;
-
每个 GPU 根据它们自己维护的优化器状态对一部分参数做更新;
-
All Gather 参数,这里产生了
#params的通信开销。
对比朴素 DP,Stage 1 就是将一个 All Reduce 操作替换为了 Reduce Scatter + All Gather,并将参数更新的步骤插入到二者之间。之前提过,All Reduce 与 Reduce Scatter + All Gather 是等价的,也就是说,我们在没有新增通信开销的情况下拿到了显著的内存收益。
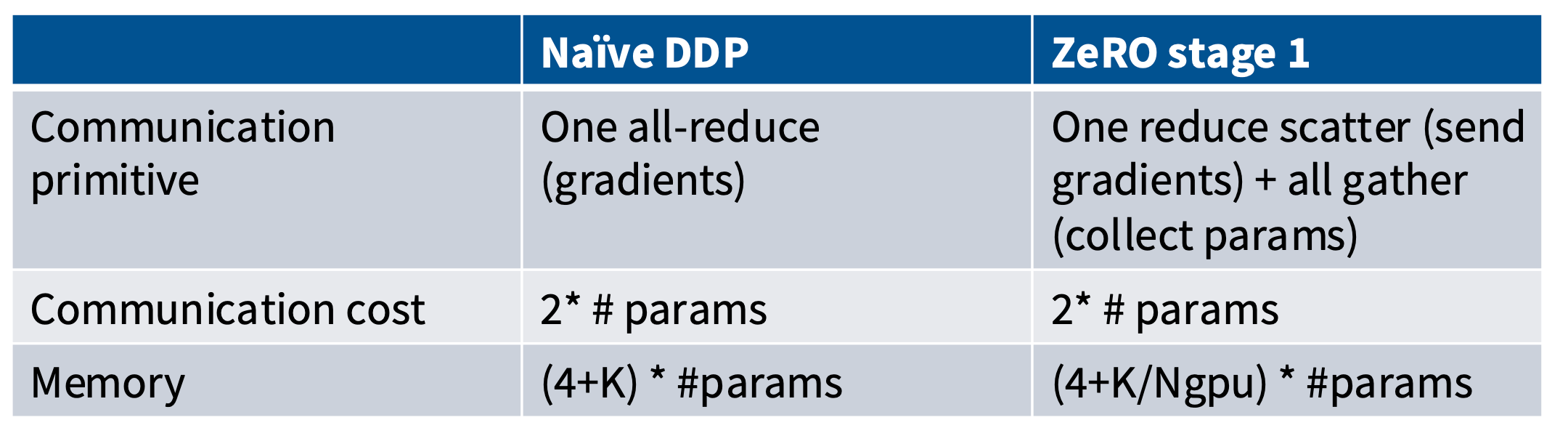
- Stage 2:切分梯度和优化器状态
在 Stage 2 中,我们尝试在 Stage 1 的来切分梯度。切分梯度,也就是每块 GPU 保留一小片空间用来存放自己负责的那个切片的梯度。在 Stage 1 中,我们需要先计算完所有的梯度后再对梯度做 Reduce Scatter。为了减少梯度的占用空间,必须得当梯度算完之后立刻做 Reduce Scatter,将其发送到存储这片梯度的 GPU 上,然后当计算图用不到时扔掉不属于自己的梯度。
具体来说,其算法步骤为:
- 计算一层梯度后,立刻做 Reduce Scatter 将其规约到正确的 GPU 上;
- 一旦梯度在计算图中再也用不到了,立刻释放对应的空间;
- 每个 GPU 更新参数;
- 对参数做 All Reduce。
相比 Stage 1,其通信开销保持不变。在 Stage 1 中对梯度做的一次性 Reduce Scatter 在 Stage 2 中被拆分为多次,但是彼此没有重合,所以整体通信开销不变。
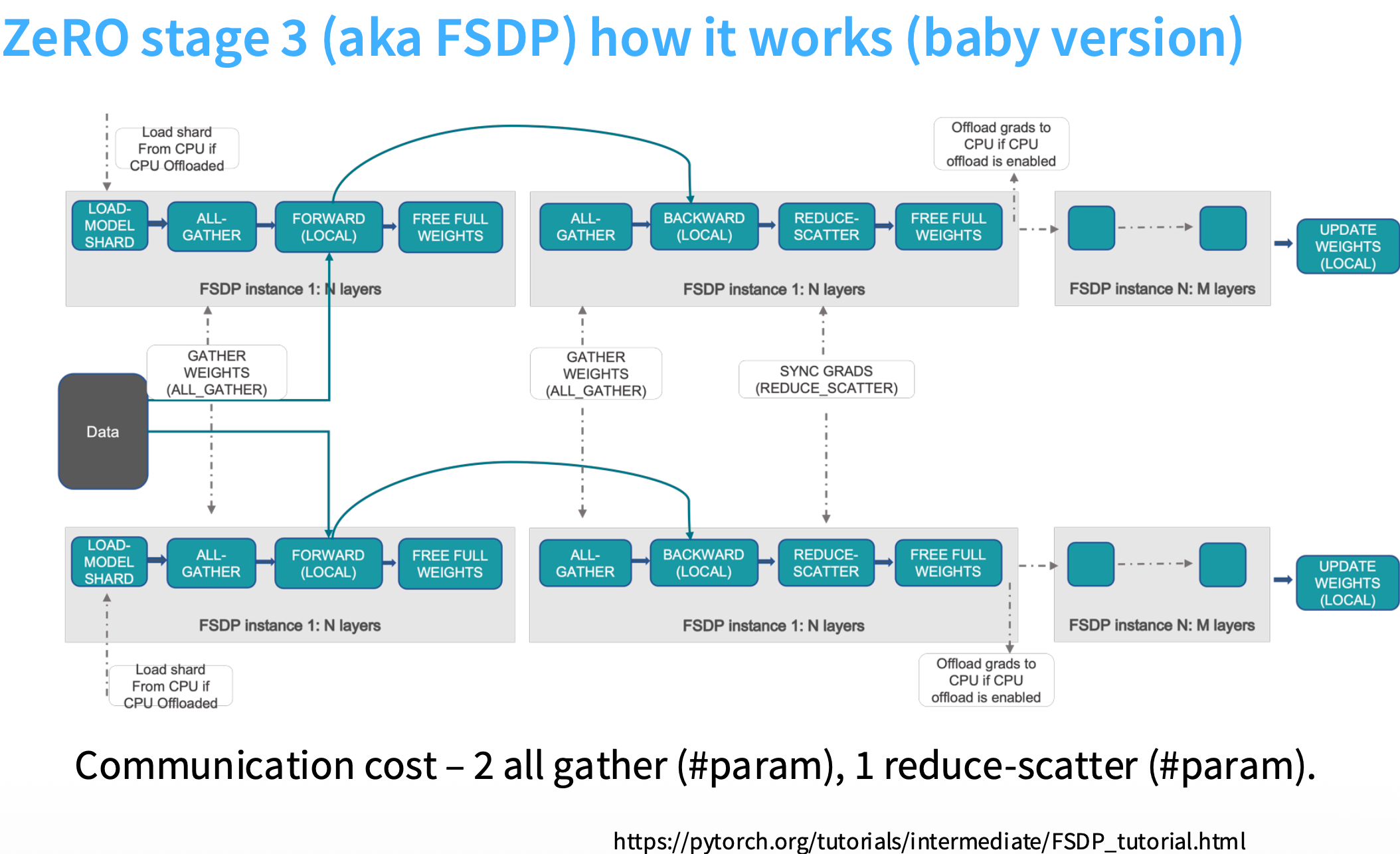
- Stage 3 (FSDP):切分梯度 + 优化器状态 + 参数
在 Stage 3 中,参数也被切分,因此进行前向计算时,需要通过通信获取完整参数。如下图所示,在进行前向和反向计算钱,使用 All Gather 获取完整的权重再进行下一步的计算。
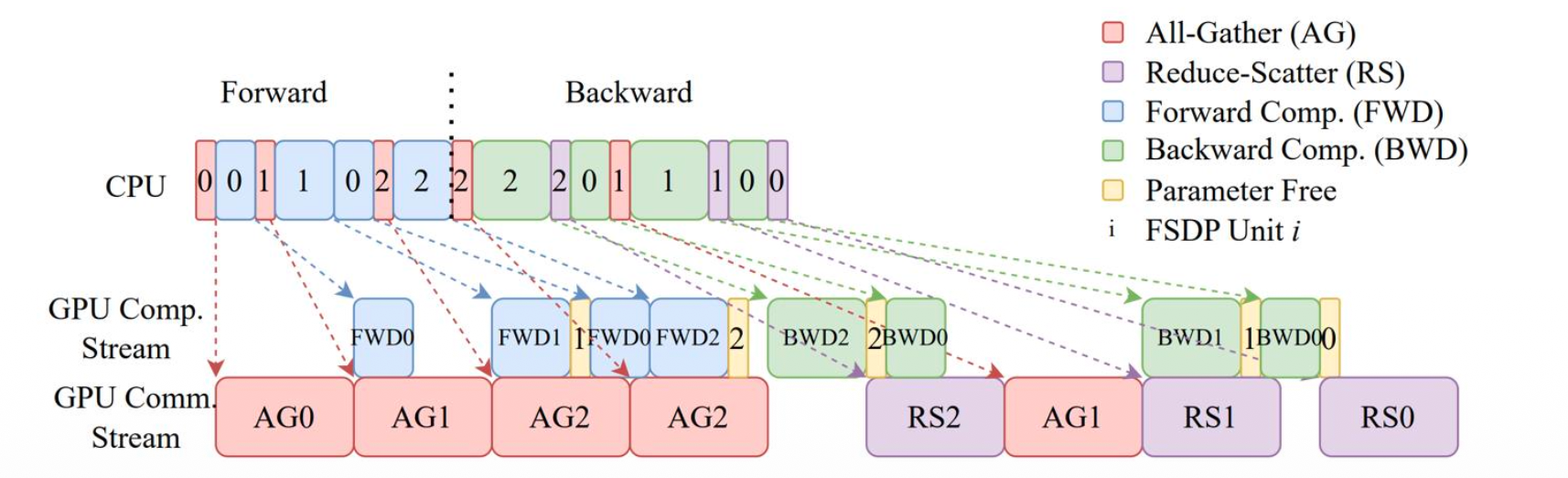
每次计算前都要做一次 All Gather,这里面的通信开销非常大,但是也并非慢到无法接受。这得益于 Stage 3 将通信和计算折叠:如下图所示,除了第一个前向计算 FWD0 之外,其他的前向计算需要的通信都可以与前一此计算重叠,如果前一层的计算时间大于拉取下一层的时间,通信延迟还能够被完全隐藏。
Stage 3 的通信量是 3 x #params,包括前向和反向各一次的 All Gather 和计算梯度时的 Reduce Scatter,是 Stage 2 的 1.5 倍。
DP 的限制
Data Parallelism 不是万能,其有如下限制:
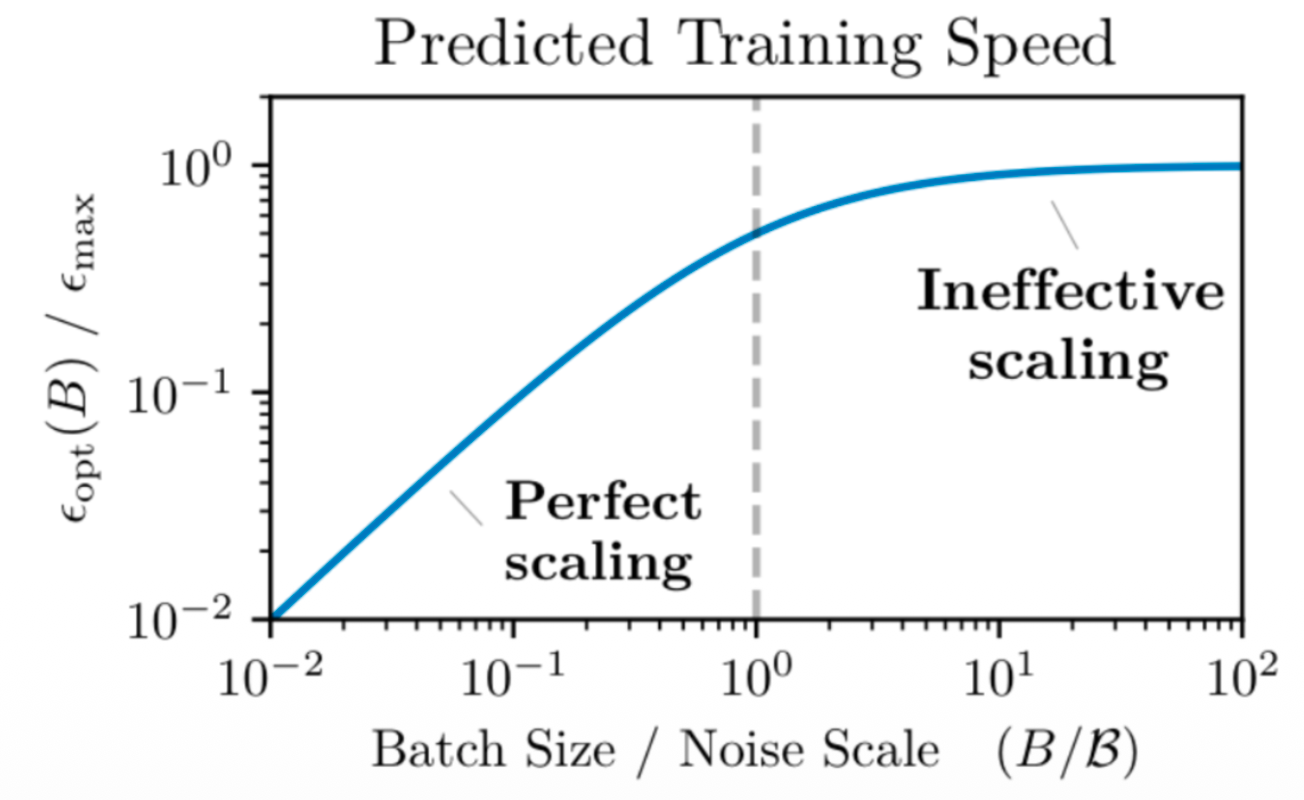
- DP 并行数必须小于 Batch Size。Batch Size 不是越大越好,当 Batch Size 过大时,其所需要的训练步数并不能同比下降,也就是模型并不能学的更快。而 DP 的并行数必须得小于 Batch Size,这就约束了 DP 并行的上限。
- ZeRO 各有优劣。Stage 1 和 2 几乎没有额外开销,但是没有切分模型;Stage 3 有额外的开销并且不能减少激活值的内存。
模型并行 Data Parallelism
在 ZeRO Stage 3 中我们将对激活值做切分,从而解决数据并行中难以扩展内存的痛点。在模型并行中,也会将参数切分到不同的卡上,但是卡间交换的是激活值而非参数。模型并行有两类实现,包括流水线并行和张量并行。
流水线并行 Pipeline Parallelism
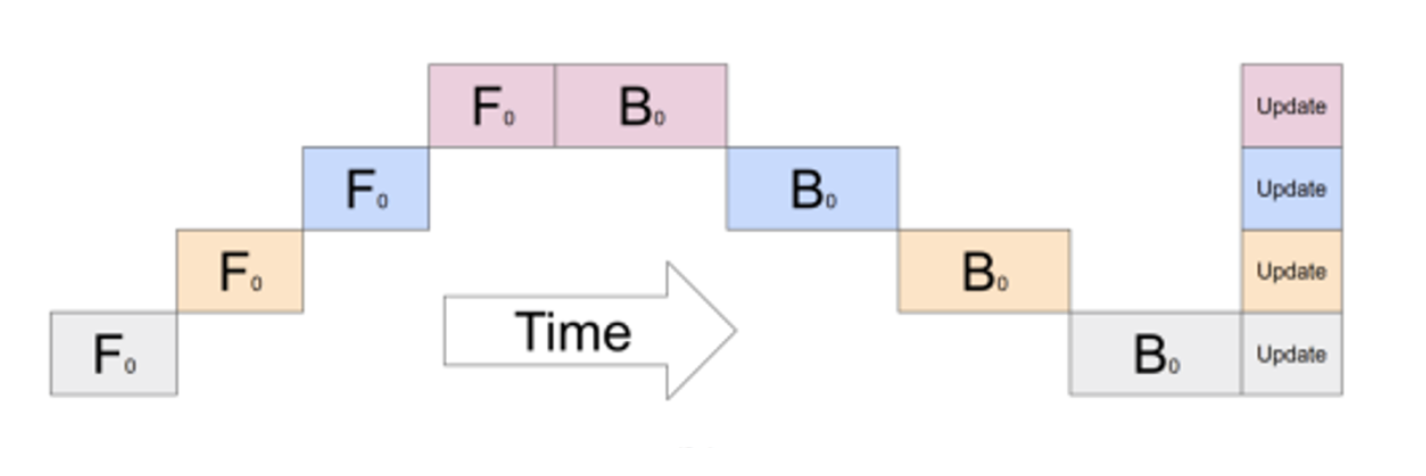
流水线并行指的是将不同的层切分到不同的卡上,数据像流水线一样在 GPU 之间流动。这是一个很符合直觉但是实现比较困难的并行策略。如下图所示,如果再等待其它卡的过程中什么也不干,每张卡只有 1/n 的时间处于激活状态,效率极其低下。
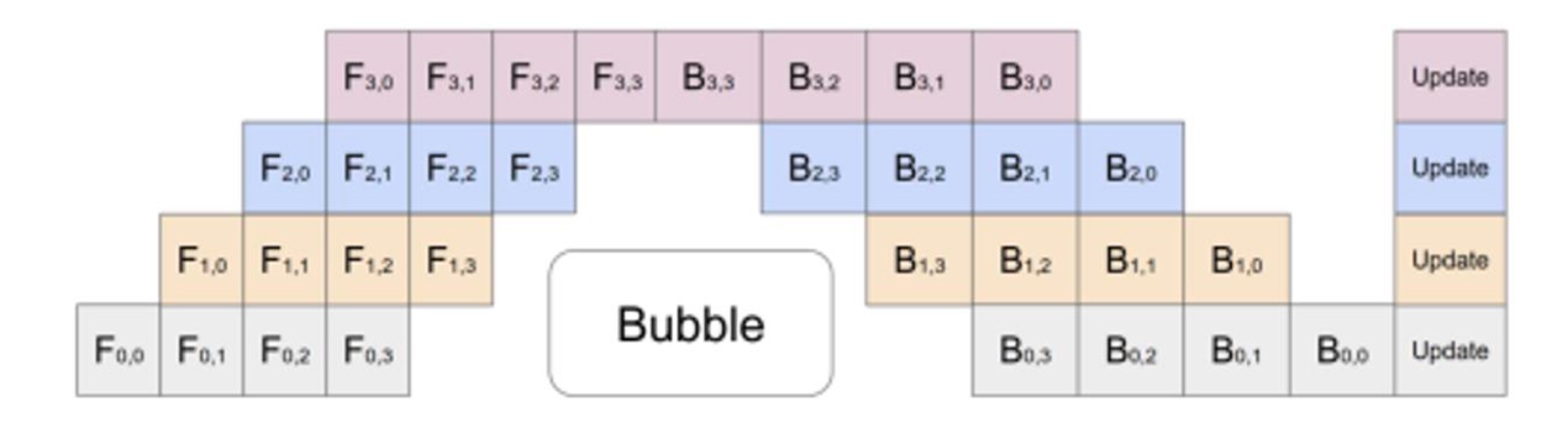
对此的解决策略是将一个 Batch 分割多个小 Batch,并依次送入流水线中。如下图所示,将数据分割为四条送入流水线,仍会有一些空泡,但是整体效率相比上面的朴素实现得到了提升。整体的空泡率为:$(n_\text{stages}-1)/n_\text{micro}$,Micro Batch 越多,空泡率越少。但是,与模型并行一样,Micro Batch 同样受限于 Batch Size。
既然 PP 也没多好,为啥使用它?
- 相比 DP,PP 能够节省显存,它不仅对参数进行了切分,还对激活值进行了切分。
- PP 只需要进行点对点的通信,很适合部署在通信链路效率不高的机器之间。
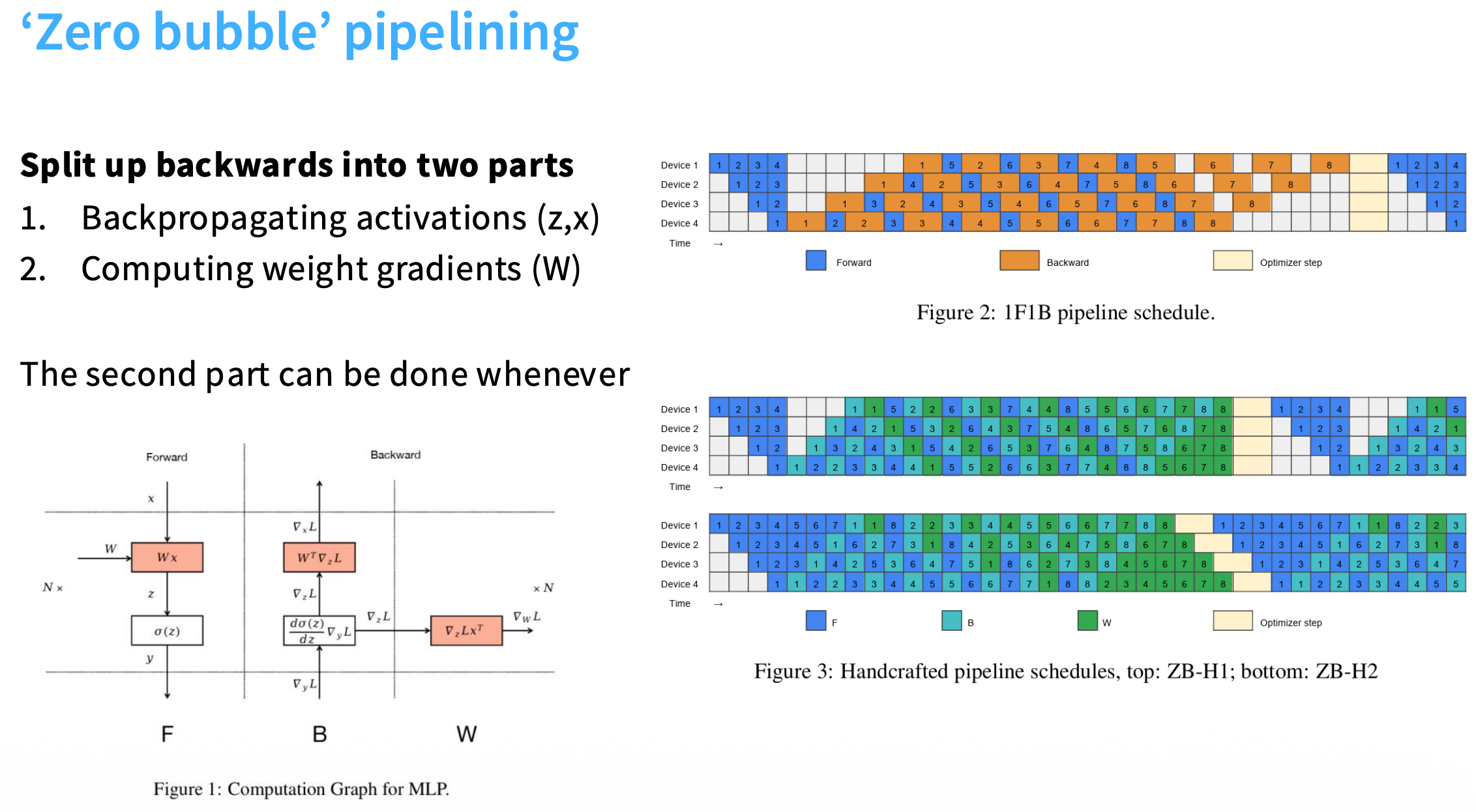
最后还介绍了 Zero Bubble Pipeline。具体来说,反向计算可以分成两步,第一步是计算对输入的微分 B,第二步是计算对权重的微分 W。其中,对输入的微分是前一层依赖的 OutGrad,必须尽可能快地计算;后者是不被其它卡依赖的,只要在梯度更新前算完即可。Zero Bubble Pipeline 的核心思想就是优先完成 B,当流水线空闲时再完成 W。当然,这只是一个 High level 的介绍,老师一直在强调在工程实现中不管是这个 Zero Bubble Pipeline 还是单纯 PP,其实现起来都相当困难。
张量并行 Tensor Parallelism
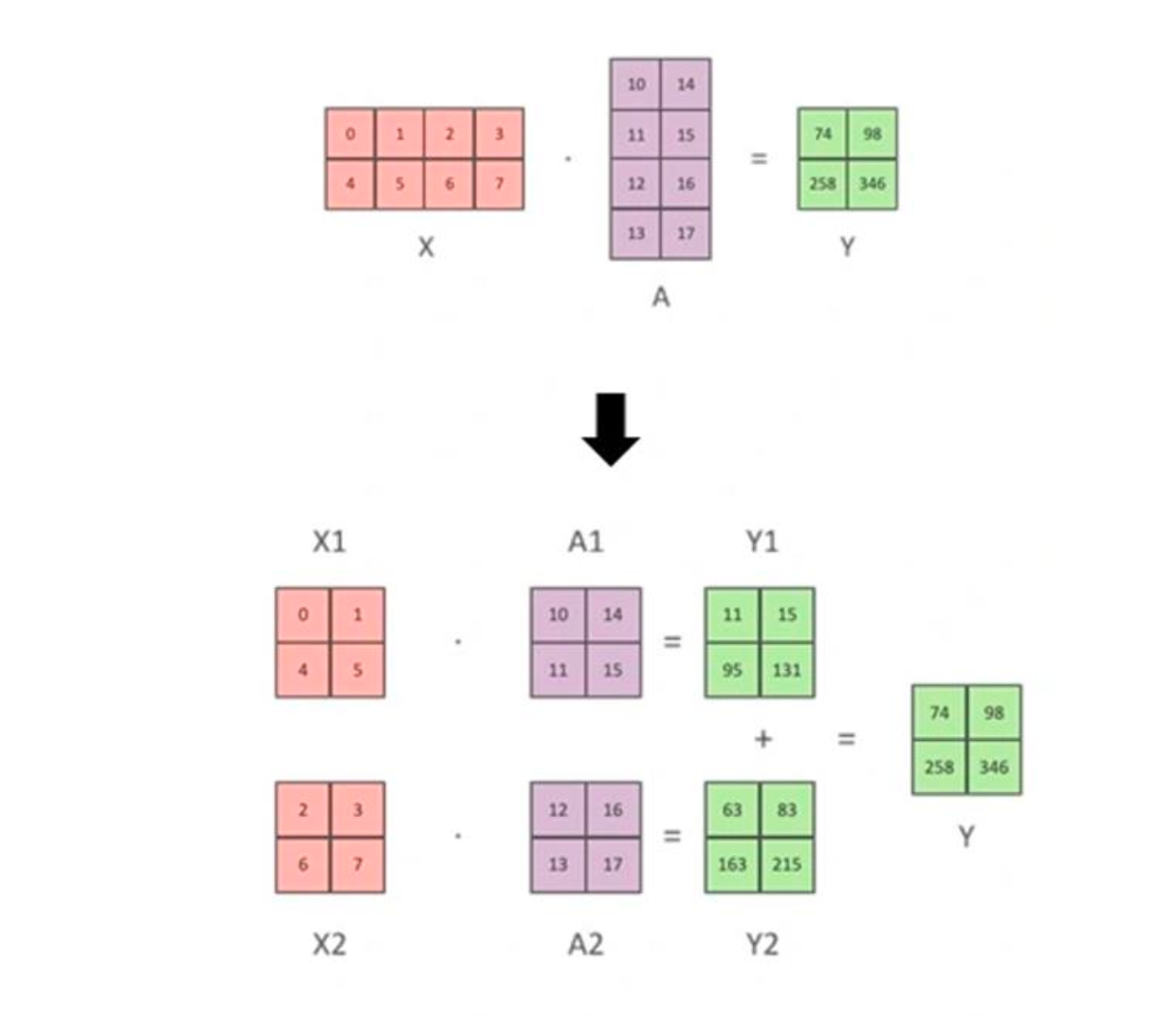
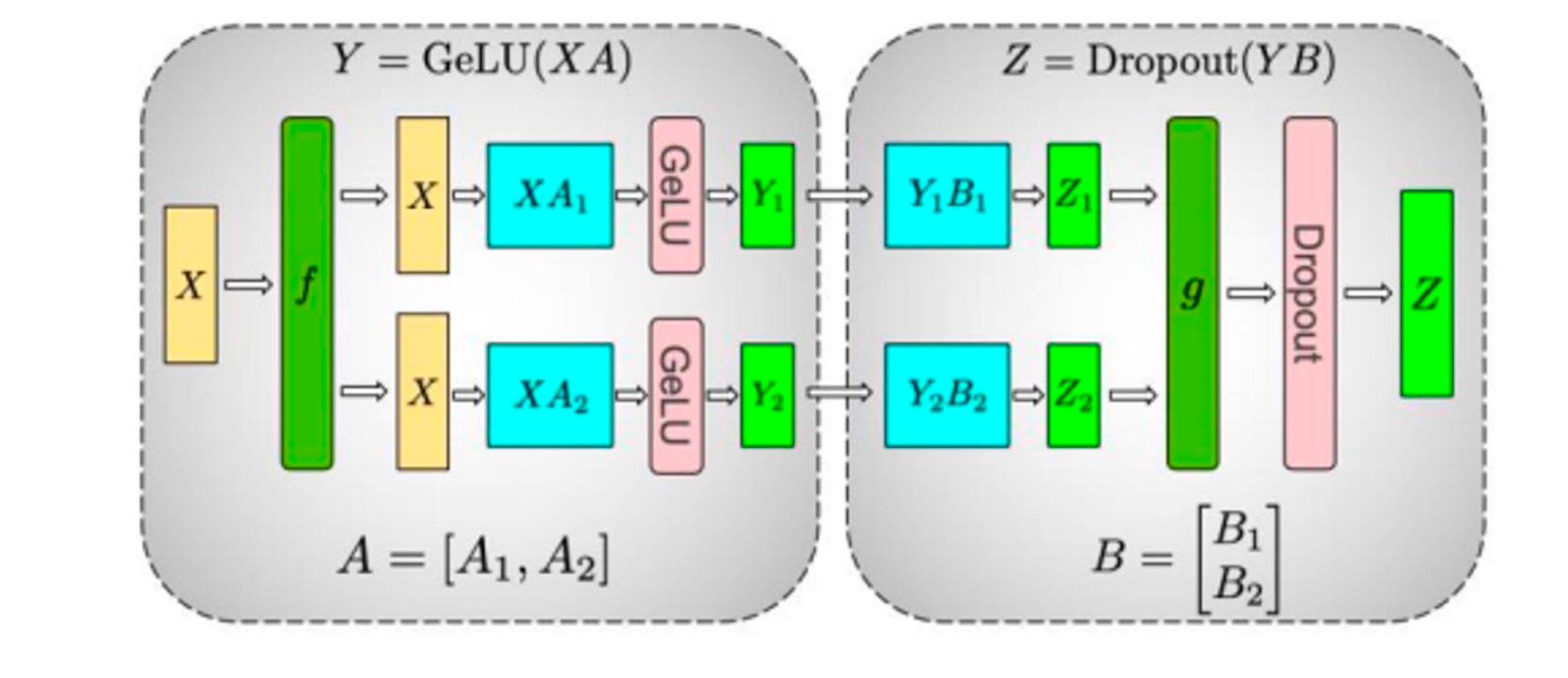
流水线并行可以认为是沿着纵轴对模型切分,张量并行则是对横轴切分,即将一个大的矩阵运算切分到两张卡上,如下图所示,X@A = X1@A1 + X2@A2 = Y。
下图展示了一个 MLP 网络中的标准切分方式:第一个矩乘的权重按列切分,第二个按行切分。
前向的流程是:输入 X 通过恒等映射 f 复制到所有卡上,GPU 1 计算出 XA1,GPU 2 计算出 XA2,由于激活函数是逐元素独立计算的,因此无需与其它 GPU 通信。此时 GPU 1 正好持有按按列切分的 Y1,GPU 2 持有 Y2,这与行切分的 B 在维度上完美对应,不需要进行 All Gather 操作即可继续流转到第二个矩乘上。然后再经过 All Reduce 操作 g 对输出进行聚合,就可以得到完整的 Z。
反向的流程与前向类似,只是操作 g 变成了恒等映射,操作 f 变成了 All Reduce 操作。
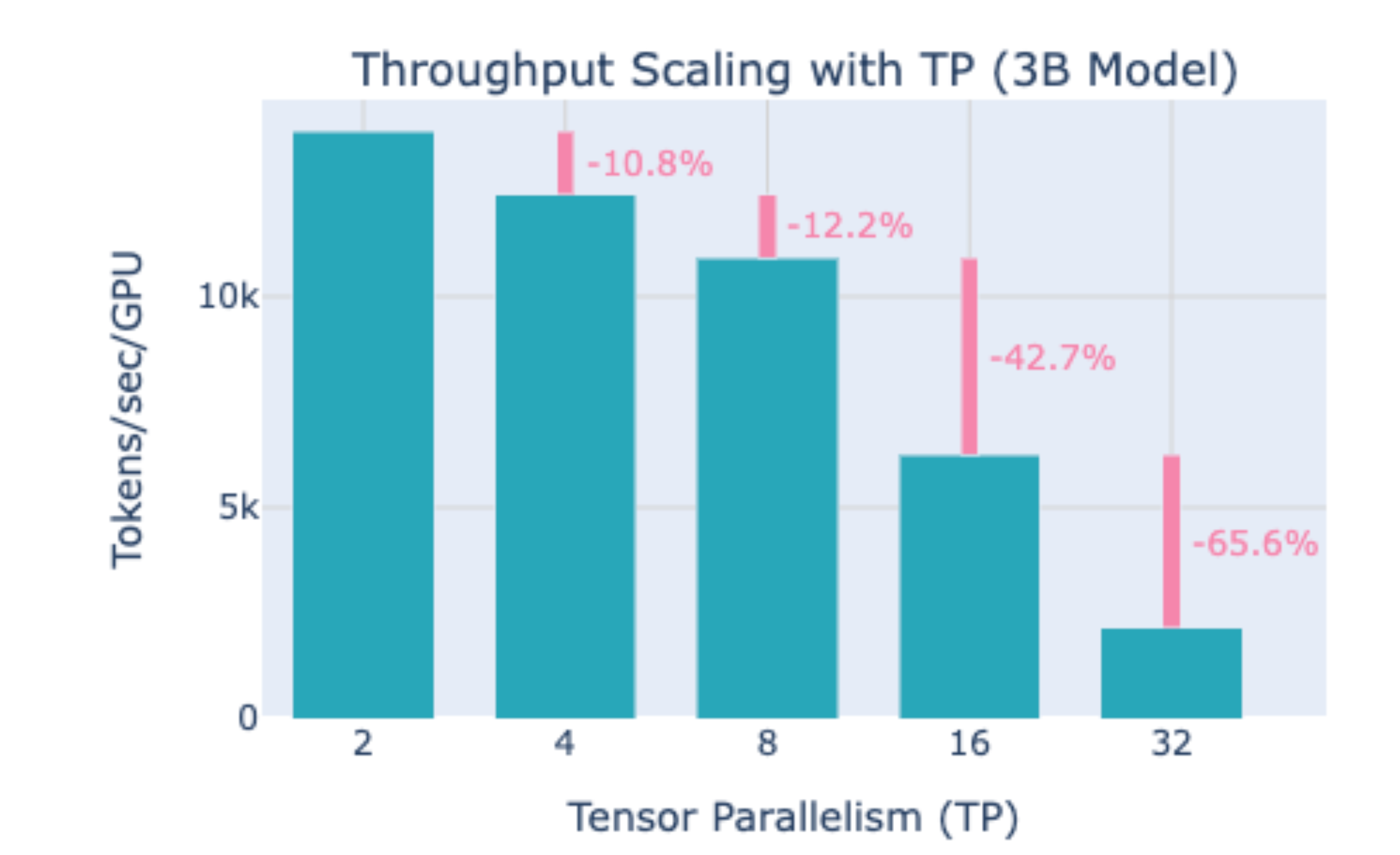
TP 在每一层中都需要进行大量的通信,因此其对通信要求很高。如下图所示,当 TP 并行度大于 8 时,单卡吞吐量显著下降。同一个节点内的卡通信速度很快,通常 TP 在一个节点内的 8 张卡上部署。
序列并行 Sequence Parallelism
目前介绍的 TP 和 PP 都是对模型参数进行切分的,但是没有切分激活值。在训练过程中,模型的激活值可以通过以下公式来估算:
其中变量含义如下:
- $s$ (sequence length): 序列长度
- $b$ (microbatch size): 微批次大小
- $h$ (hidden dimension size): 隐藏层维度
- $a$ (number of attention heads): 注意力头数
激活值由两部构成,第一部分是线性项,来自 MLP 、Attention 中的线性投影和 LayerNorm;第二部分是二次项 $5bas^2$,这部分来自 Attention 机制,包括注意力分数、Softmax 结果等,这部分可以通过 Flash Attention 的重计算消除。
应用 TP 后,显存占比中线性部分中的系数 24 可以减少为 $1/t$,其中 t 是 TP 并行度。,没有变化的系数 10 来自非 Matmul 的部分,包括 LayerNorm(4)、Dropout(2)、Attention 和 MLP 的输入(4)。
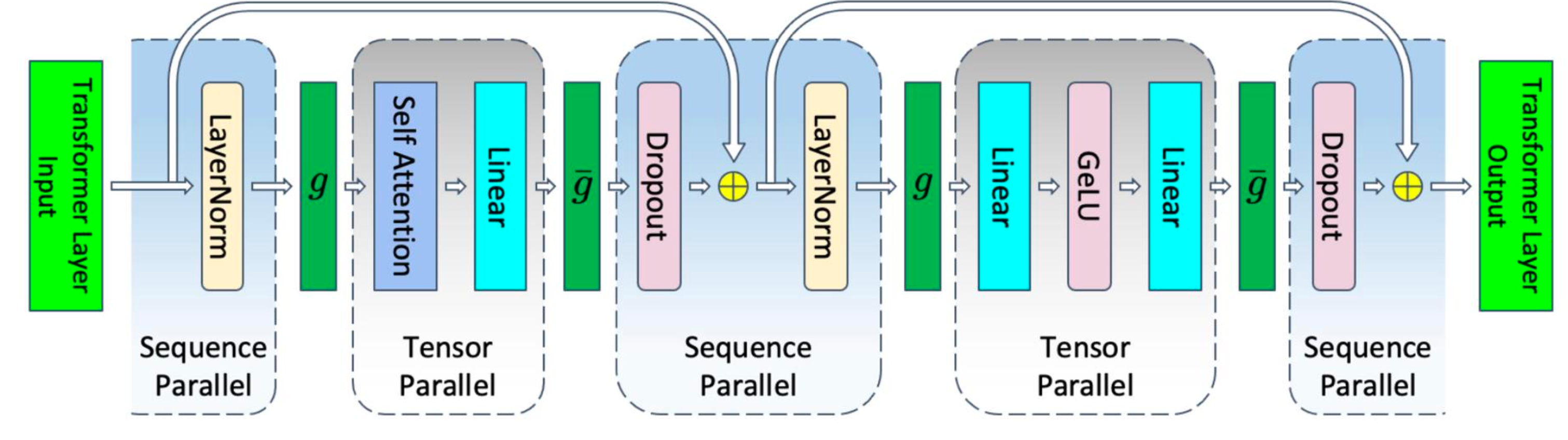
以 LayerNorm 为例,其对每一条序列独立地做 Norm,因此可以通过在序列维度上进行切分,从而降低显存占用。如下图所示,在 LayerNorm 和 Dropout 上做了序列并行,在前向中,LayerNorm 的输出需要经过一次 $g$ All Gather 以将完整 Tensor 送入 Attention,Dropout 的输入需要经过一次 $\bar{g}$ Reduce Scatter 以将完整 Tensor 按序列切分。在反向中,$g$ 和 $\bar{g}$ 操作交换。
应用 SP + FA 后,模型整体的激活值可以降低为 $sbh \left(\frac{34}{t}\right)$。
| Configuration | Activations Memory Per Transformer Layer |
|---|---|
| no parallelism | $sbh \left(34 + 5\frac{as}{h}\right)$ |
| tensor parallel (baseline) | $sbh \left(10 + \frac{24}{t} + 5\frac{as}{ht}\right)$ |
| tensor + sequence parallel | $sbh \left(\frac{34}{t} + 5\frac{as}{ht}\right)$ |
| tensor parallel + selective activation recomputation | $sbh \left(10 + \frac{24}{t}\right)$ |
| tensor parallel + sequence parallel + selective activation recomputation | $sbh \left(\frac{34}{t}\right)$ |
Ring Attention 和 专家并行
最后简单介绍了下 Ring Attention 和专家并行。
Ring Attention 解决的痛点是超长序列中单卡装不下 KV Cache,其核心思想是将 KV 进行切分,GPUs 之间以环的形式流转 $KV_i$,并计算出相应的结果。
专家并行则是将专家散布到不同的 GPU 上,会面临来自负载均衡和计算通信 Overlap 的挑战。
使用并行策略扩大 LM 的规模并训练
3D 并行
3D 并行指的是混合使用 DP、PP 和 TP 策略,一个简单的原则是:
- 先将模型切分到单卡放得下
- 使用 TP 策略,TP 并行度不大于每个节点内 GPU 的数量
- 在节点之间使用 PP 或者 ZeRO Stage 3,取决于带宽大小
- 扩大 DP 规模直至达到 GPU 上限